 |
 Updated 2/25/01 (Hercules 2 is on a new team!) |
|
Updated 2/25/01 (Hercules 2 is on a new team!) |
1998 The Design
and Build Process |
| How do I make a spike that is supposed to swivel up and down strong enough at the base to withstand the tremendous impacts with other robots? Well, I started with a 1" hardened steel shaft, held securely between two huge industrial strength bearing blocks and strengthen all surrounding frame mounts to avoid bending or breakage. | 
|
| Then I mounted a large sprocket to the shaft. I created several different spike assemblies that will fit on this shaft, so depending on the opponent, I can exchange weapons! The spike itslef is welded to the oversized hardened sproket. The assembly (minus the sproket and spike) weighs in at about 12lbs! The spike itself is hardened steel and is VERY durable- it should neither bend nor break. The whole assembly is built to absorb the repeated frontal (and even sideways) impacts with other robots. The gearmotor used for moving the spike assembly up and down is a Dayton 12v gearmotor (running of course under 24v), this sucker is about twice as fast and nearly twice as powerful as the gearmotor I used in Hercules '97 (that older one is now in Junior) |  |
 |
Next up is the drivetrain. This robot HAS to be fast and powerful for the weapon to be effective. Originally, I had planned to use the motors you see here. These were cutom constructed for me just for this project. They are series-wound motors built originally for hauling up heavy anchors on medium sized boats! They turned out to be complete overkill. At 24v and nearly 4hp, they were just what I thought I wanted, but at 20lbs each, they were simply way too heavy for this robot. Once I realized the potential of these motors, I decided they were NOT destined to be drive motors at all, and I ended up using ONE of them for Nightmare's weapon in '99. |
 |
Halfway into the build, I abandoned the crazy motors for some much simpler and smaller 24v permanent magnet 2hp motors at about 7.5 lbs each. With a net savings of about 25 pounds off the robot, this was DEFINITELY a good move! |
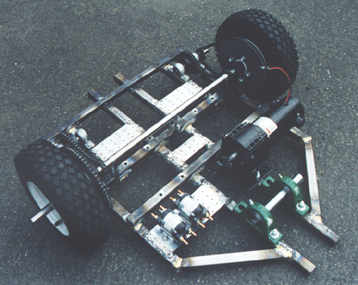
| The motors work through a two-step chain geardown system, the motors drive a 11-1 geardown ratio to the wheels. The rear shaft you see here holds two sprockets of different sizes to finally drive the 60 tooth sproket for the wheels. Each wheel is mounted to a single stationary shaft which is mounted to the frame. Each wheel has its own bearing system so resistance is minimal. The speed that these wheels can turn is amazing- Hercules can go about 25mph! |  |
|
| Here you can clearly see the shape of the robot coming together. The frame is welded steel tubing, with the 4 center pieces being the inner steel skeleton- these center crossmembers are 3 times stronger as the outer frame (note that I say "welded", but I actually didn't know how to weld yet, so I was using an Oxygen/Mapp gas setup for steel brazing- not quite as strong as a weld, but more accessible for me- I have since learned to weld and now have more equipment for my robot projects) . Here the gearmotor is in position for the spike assembly, and in the front, you can see the two 150amp solenoids that I was planning on using with those huge serias-wound motors! These have since been removed to make room for the two 4QD Pro120-24 speed controllers. |
 |
The batteries I decided on are beastly! 12v 28ah each, these suckers weigh in at 19 pounds each! They are wired in series to get the 24v that I need for the drive motors and gearmotor. Believe it or not, the motors draw so much current that both of these batteries are nearly unusable after 10 minutes running of Hercules! The 4QD Controllers can get a little warm during this time, so I installed a fan to help keep things cool inside.
(update: I have abandoned the 4QD controllers and changed out for a Vantec speed controller instead) |
| As I continued building the frame upwards, I left just enough room for the two batteries in the back. These compartments are perfect size for the batteries, and hold them nice and snug. I surrounded the entire area with padding before bolting down the batteries. |  |
 |
Here is a shot of Hercules nearly completed. From here, I continued to reinforce the frame, welding in brackets in the major impact areas and strengthening the whole thing overall. The next step was one of the most difficult (and epxensive!) -The Armor! I decided on Titanium armor due to the strength and the fact that I had a very limited amount of weight remaining to stay in the heavyweight RW category. I found a great deal on a single large sheet and drew up a plan for the top and bottom plates and took them to Donal machine shop in Petaluma, CA. They completed the welding for me (I definitely didn't want to attempt welding Titanium myself!) |
 |
 |
| The result was an almost-perfectly fitting armor plate for top and bottom of the robot. As you can see from these two pictures, the robot is completely symmetrical, being able to drive right side up... | ... As well as upside down! Caster wheels on both sides enable Hercules to drive reasonably well either way. As a matter of fact, I even programmed my remote control with just the flip of a switch to reverse the steering properly! |
In all the key impact areas of the robot and areas around sensitive equipment, I doubled and sometimes TRIPLED up the armor with extra stainless steel plates. All the electronics are fully isolated and mounted to shock-reducing interior plates. Every wire has been carefully routed to avoid being pinched or broken in an impact. I designed this robot to be hit HARD and to HIT hard! After seeing what Blendo did to my robot last year, I wanted to make sure that the same thing couldn't happen twice. So far I feel pretty confident that it worked.
| The result is a robot
I can be proud of. Hercules weighs in at a hefty 183 lbs. He can drive
about 25mph and can take a LOT of abuse. The spike can puncture every
material I have tested so far, and the spike motor system is capable of
lifting nearly 300 pounds easily! Having a good selection of attachments
for the weapon will allow me to be versatile during battle. Most of my
difficulties now are in the practice sessions of control and driving.
In retrospect, I kind of wish I had made Herc Four-wheel drive, as he
tends to like to go in directions I don't want him to. With enough time
to practice, I believe he shoud be pretty lethal in the arena (if he
ever gets to fight, of course!) Update, Feb 2001: Since Herc 98 was never actually in battle, he was sitting around my shop, gathering dust. I had posted, jokingly, on this page "Anyone want to buy a robot?" little did I know the bombardment of emails I would get over the last year about this. After over 100 emails on this subject, I finally found a serious buyer! On Feb 25, 2001, Hercules 98 left my posession for good and will be resurrected to fight in an upcoming BattleBots event on a new team! Cool! Don't know what his new name or even his appearance will be, but watch for his premiere someday in the BattleBox! |
 |
![]()
![]()