WallopWallop is Team Nightmare's first 3 pound (BeetleWeight) robot, and my first bot with more than 2-wheel drive! Wallop uses a powerful servo lifting arm hooked to a thick titanium wedge-plow. Drive power is four B62 gearmotors run by 22.2V of LiPoly batteries. For arenas with a steel floor, Wallop uses four powerful neodynium magnets for wheels, giving him amazing traction. This bot can can drive around upside-down on a steel surface, or up a steel wall (cool to show off).
WALLOP'S FIGHT HISTORY:
October 9-10 2004: A totally rebuilt Wallop (new titanium scoop and armor!) won the 2004 RFL National Championship! Now he gets to brag for an entire year about being the national champion.... July 1-4 2004: Wallop fought valiantly and took home 3rd place at the NPC Charity Open in Anoka, Minnesota. May 22 2004: Wallop won the 1st place championship at the SacBots-Gilroy event.
March 20-21 2004: Wallop won 2nd place at his first event, the RobOlympics event in San Francisco! Wallop is now qualified for the 2004 nationals in October 2004.
Update 10/6/04:
I rebuilt Wallop from the ground up in preparation for the RFL Nationals event. The rebuild took about 5 days of planning and 2 days of labor.
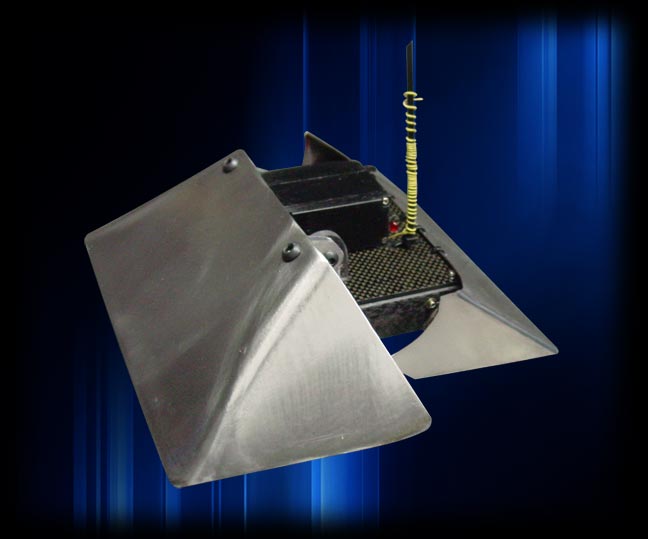
Wallop with his new Titanium lifting plow and titanium rear wheel protectors/wedge!
This Wallop is completely rebuilt with an all-carbon fiber body. New narrower shape too, makes it easier to turn and reduces weight (which was needed to change out the aluminum for titanium!). The body itself is now actually narrower than that of my antweight Shazbot!
I wanted to clean up the look of this robot, which was quite kludged-looking before, so attention to detail was important.
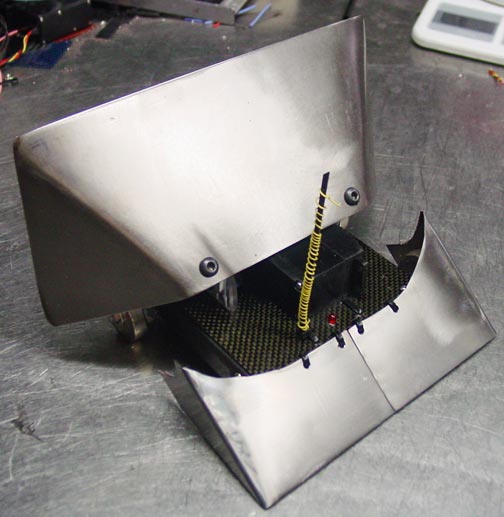
Here you can see the new titanium plow and rear wedge clearly. Note the lifting range of the plow. The rear hinged wedge serves multiple purposes as wheel guards, rear armor as well as an offensive wedge. It is split into two parts to make sure one side is always against the floor.
Here are a few photos of the first version of Wallop:
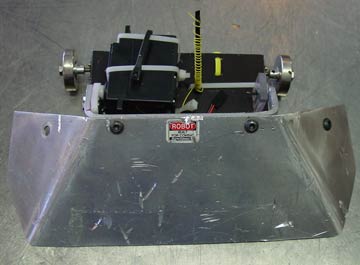
The overhead/front vew. I angled the sides of the plow in to better protect against horizontal spinners.
Range of motion of the servo-powered lifting plow. It doesn't go all the way around like on Shazbot, but it certainly does lift pretty high. Enough height to lift many other bots out of the arena.
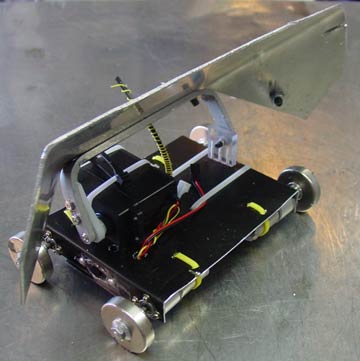
You can see a clear view of all 4 drive wheels. In this configuration, Wallop is using Magnet wheels. For arenas that do not use a ferrous surface, Wallop switches out to high-traction rubber tires instead.
The back view. Not much to see here, but it's another angle to view the bot.