The
Design...
Hercules 1997 was
my first attempt at a combat robot. I felt good about the design, but
lacked some of the skills and materials to make things work the way
I wanted, but went for it anyway. Here are some of the details on the
design of Hercules I:
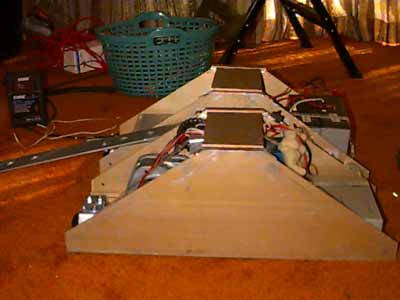
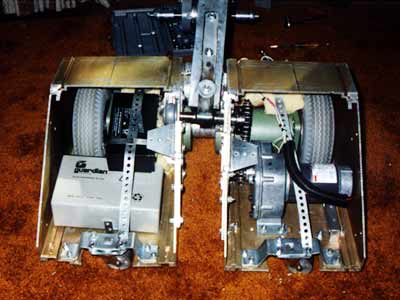
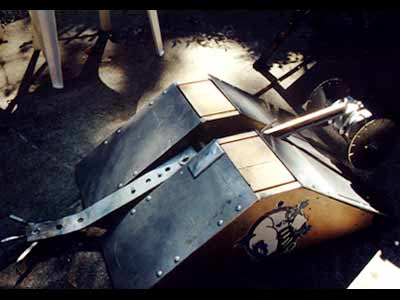
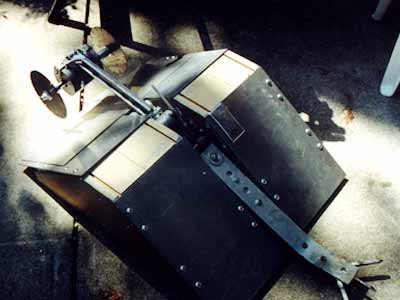
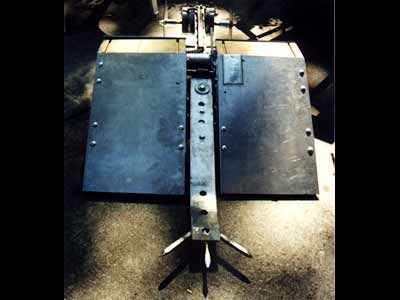
Hercules was built
with two strong aluminum boxes cut into a 'wedge' shape in front and
back. There is about a 3.5 inch wide gap between the boxes that is the
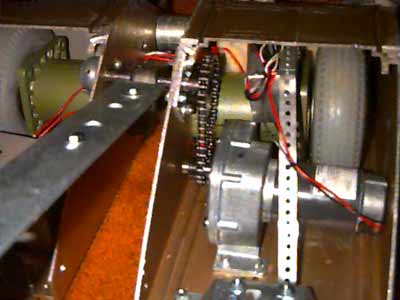
section for the flipper arm to move through. Steel pipes hold the two
sides together. Each side has its own motor and wheel. The motors are
some surplus 48v DC motors pushing almost 1hp each. Unfortunately, due
to time and space constraints, I was unable to do the proper geardown
on these, so I had to run the motors direct drive to the wheels. The
drive wheels and tires are 8 inch diameter wheels from a motorized wheelchair,
and are inflatable and strong. These provide excellent traction and
steering capabilities. I was pleased with these wheels and would recommend
them any time-although they were not cheap. The speed control is also
one area I didn't want to cut corners... I bought a Vantec RDFR series
speed control to hook to the Futaba radio reciever. I would definitely
recommend these Vantecs! They save a lot of time, and in the long run,
is well worth the price you pay. By my estimates, over half the robots
at Robot Wars were using Vantecs.
Hercules used four
12v 12ah batteries to power the drive motors and the weapon systems.
One big problem occurred after the first battle disaster, due to a massive
attack by the most destructive robot there (Blendo), my Vantec was shorted
out and I had to rush and build a homemade speed control. To fit the
makeshift control into the already-packed robot, I had to pull one of
the four batteries out, so instead of the intended 48v, Hercules was
running at 36v, and barely half the speed he was designed to for the
remainder of the event!
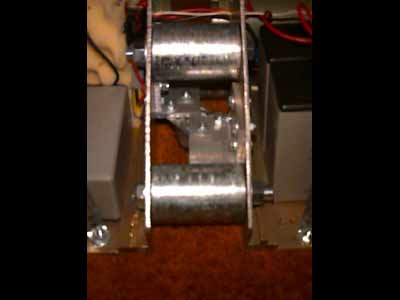
The main weapon
for Hercules '97 was the flipping arm. On the front, a flat steel flipping
arm is powered by a very high torque 12v DC gearmotor further reduced
by a chain drive and sprocket assembly. At the shaft, the motor is rated
at lifting 1500lbs! With the arm attached, Hercules is easily capable
of lifting a 200lb robot off the ground! The flipping arm has almost
a 270 degree turning radius, so not only can Herc flip over other robots,
but he can flip himself back over if he needs to! (This came in very
useful during one of the melee events!) The arm can go almost all the
way back over the top, and straight down- if I ever need to.
On the other end,
Hercues had a 5300rpm dual-shaft motor that I can attach different blades
to. I even created a double chain-flail attachment! I have synthetic
diamond wheels, metal cutting blades and other weapons of destruction
for attachment to the motor. The arm that the cutting motor is attached
to can swing upward if it gets hit, hopefully eliminating the possibility
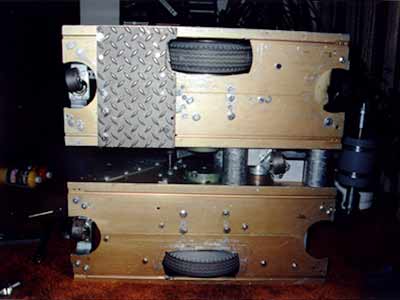
of a shattered blade. The sides, top and underside of Hercules are mostly
aluminum, with stainless steel plates in key locations. Hercules '97
had armor all around. Even the wheels were protected on all sides but
the actual drive surface. |