|
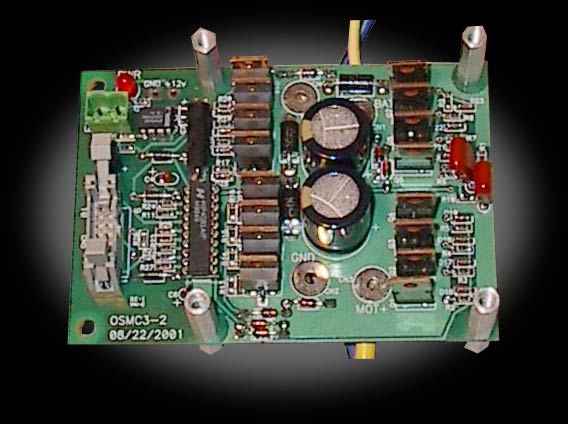
Open Source Motor Control (OSMC) The OSMC is a high-power H-bridge circuit designed to control permanent magnet DC motors. It was designed expressly as a motor control for robot combat in competitions such as BattleBots™, Robot Wars™, Robotica™, and the like. The attributes of a controller for such an environment are much different than normally found in commercial or industrial motor control units. A robotic combat controller must have very high short-term power handling capability along with light weight and simple interfacing. It must drive a wide variety of motors and be easy to mount and secure from the shock and vibration of combat. The ideal controller should also be low-cost and easy to repair if needed. Unlike most
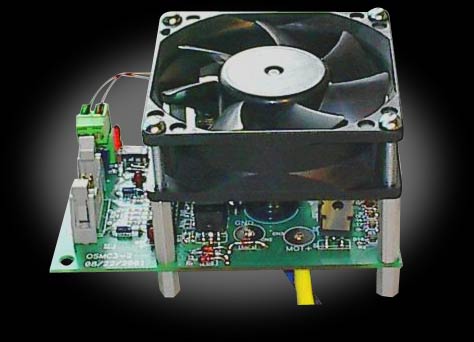
motor controls the OSMC does not use a heavy heatsink to extract
heat from the MOSFETs. Rather, it uses a cooling fan to blow air
across the board. This removes more heat more quickly than a plate
type heatsink as has lower weight. The fan itself is a commonly
available 80mm square computer cooling fan. Either a 12V or 24V
fan may be installed on the OSMC. Mounting holes are provided at
the correct spacing to mount the fan directly over the MOSFETs
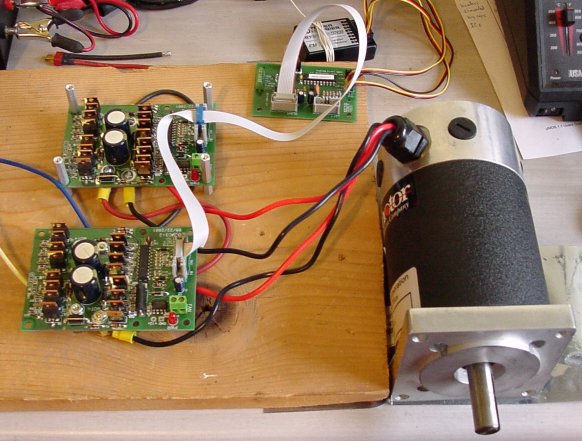
for maximum cooling efficiency. The method used by the OSMC/µRRC is superior to using two R/C-based controllers such as IFI Victor/Thor or Vantec on a four-brush motor because with the OSMC the two power units are driven by exactly the same drive signals and they will switch in perfect synchronization. Two RC-based controllers connected using a Y-cable to will not have the controllers synchronized due to differences between them. Clearly the OSMC is the way to go for maximum power handling on these large powerful motors. For some related downloadable files regarding the OSMC, see the download page. |
||||||||||||||||||||||||||||
{kind=link}