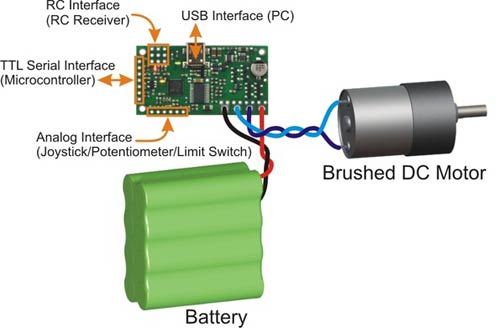
The Pololu Simple Motor Controllers are versatile, general-purpose motor controllers for brushed, DC motors. A wide operating range of up to 5.5-40V and the ability to deliver up to several hundred Watts in a small form factor make these controllers suitable for many motor control applications. With a variety of supported interfaces--USB for direct connection to a computer, TTL serial for use with embedded systems, RC hobby servo pulses for use as an RC-controlled electronic speed control (ESC), and analog voltages for use with a potentiometer or analog joystick--and a wide array of configurable settings, these motor controllers make it easy to add basic control of brushed DC motors to a variety of projects. Although this motor controller has many more features than competing products, a free configuration utility (for Windows 7, Vista, Windows XP, and Linux) simplifies initial setup of the device and allows for in-system testing and monitoring of the controller via USB.
Features
Adjustable maximum acceleration and deceleration to limit electrical and mechanical stress on the system.
Adjustable starting speed, maximum speed, and amount of braking when speed is zero.
Optional safety controls to avoid unexpectedly powering the motor.
Input calibration (learning) and adjustable scaling degree for analog and RC signals.
Under-voltage shutoff with hysteresis for use with batteries vulnerable to over-discharging (e.g. LiPo cells).
Adjustable over-temperature threshold and response.
Adjustable PWM frequency from 1 kHz to 22 kHz (maximum frequency is ultrasonic, eliminating switching-induced audible motor shaft vibration).
Error LED linked to a digital ERR output, and connecting the error outputs of multiple controllers together optionally causes all connected controllers to shut down when any one of them experiences an error.
Field-upgradeable firmware.
USB/Serial features
Controllable from a computer with native USB, via serial commands sent to the device�s virtual serial (COM) port, or via TTL serial through the device�s RX/TX pins.
Example code in C#, Visual Basic .NET, and Visual C++ is available in the Pololu USB Software Development Kit
Optional CRC error detection to eliminate communication errors caused by noise or software faults.
Optional command timeout (shut off motors if communication ceases).
Supports automatic baud rate detection from 1200 bps to 500 kbps, or can be configured to run at a fixed baud rate.
Supports standard compact and Pololu protocols as well as the Scott Edwards Mini SSC protocol and an ASCII protocol for simple serial control from a terminal program.
Optional serial response delay for communicating with half-duplex controllers such as the Basic Stamp.
Controllers can be easily chained together and to other Pololu serial motor and servo controllers to control hundreds of motors using a single serial line.
RC features
1/4 �s pulse measurement resolution.
Works with RC pulse frequencies from 10 to 333 Hz.
Configurable parameters for determining what constitutes an acceptable RC signal.
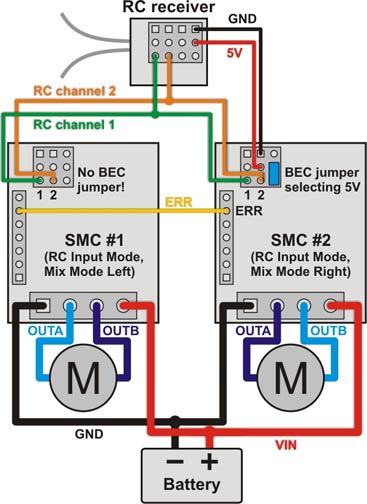
Two RC channels allow for single-stick (mixed) motor control, making it easy to use two simple motor controllers in tandem on an RC-controlled differential-drive robot.
RC channels can be used in any mode as limit or kill switches (e.g. use an RC receiver to trigger a kill switch on your autonomous robot).
Battery elimination circuit (BEC) jumper can power the RC receiver with 5 V or 3.3 V.
Analog features
0.8 mV (12-bit) measurement resolution.
Works with 0 to 3.3 V inputs.
Optional potentiometer/joystick disconnect detection.
Two analog channels allow for single-stick (mixed) motor control, making it easy to use two simple motor controllers in tandem on a joystick-controlled differential-drive robot.
Analog channels can be used in any mode as limit or kill switches.
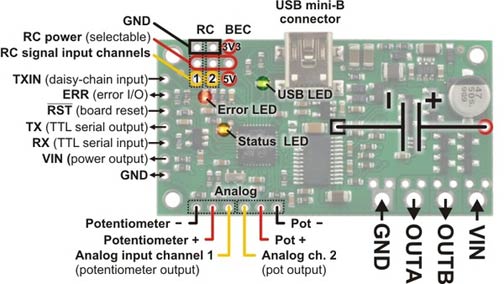
Note: The power capacitor has a significant effect on performance; the included capacitor is the minimum size recommended, and bigger ones can be added if there is space. A bigger capacitor might be required if the power supply is poor or far (more than about a foot) from the controller.
| Specs |
| Motor Channels |
1 |
| Control Interface |
USB; non-inverted TTL serial;
RC servo pulses; analog voltage |
| Minimum Operating Voltage |
5.5V |
| Maximum Operating Voltage |
30V |
| Continuous Output Current Per Channel |
7A |
| Maximum PWM Frequency |
21.77 kHz |
| Maximum Logic Voltage |
3.3V |
| Reverse Voltage Protection |
No |
| Size |
2.1 x 1.1 x 0.5 in. |
| Weight |
14g |




 User's Guide
User's Guide